| STM32 通信的基础知识&串口通信 | 您所在的位置:网站首页 › 单工 半双工和全双工的含义区别 › STM32 通信的基础知识&串口通信 |
STM32 通信的基础知识&串口通信
|
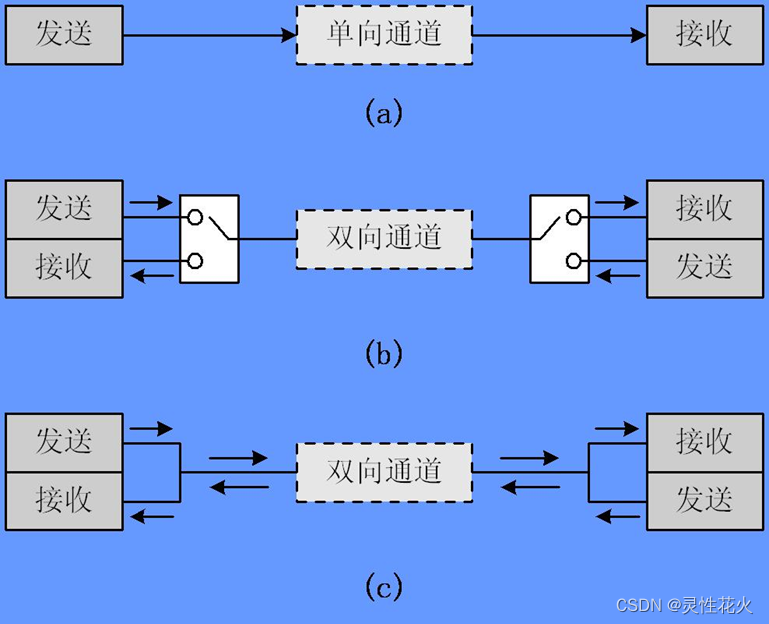
这一部分大多是理论性知识,所以贴图比较多 文章目录 通信的基础知识串行通信的通信方式常见的串行通信接口 UART异步通信相关内容。 代码 通信的基础知识并行通信 、串行通信 单工、半双工、全双工 接口可以看下面
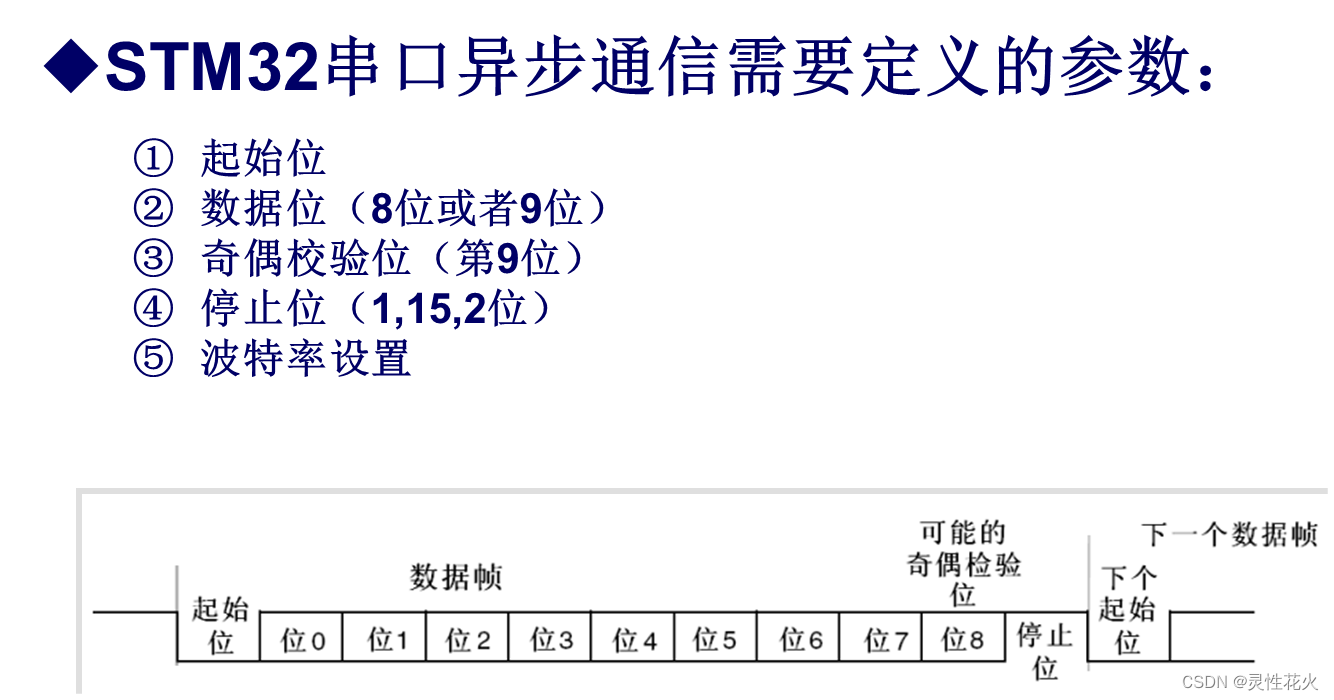
同步通信:带时钟同步信号传输。 -SPI,IIC通信接口 异步通信:不带时钟同步信号。 -UART(通用异步收发器),单总线 USART两种都可以 常见的串行通信接口
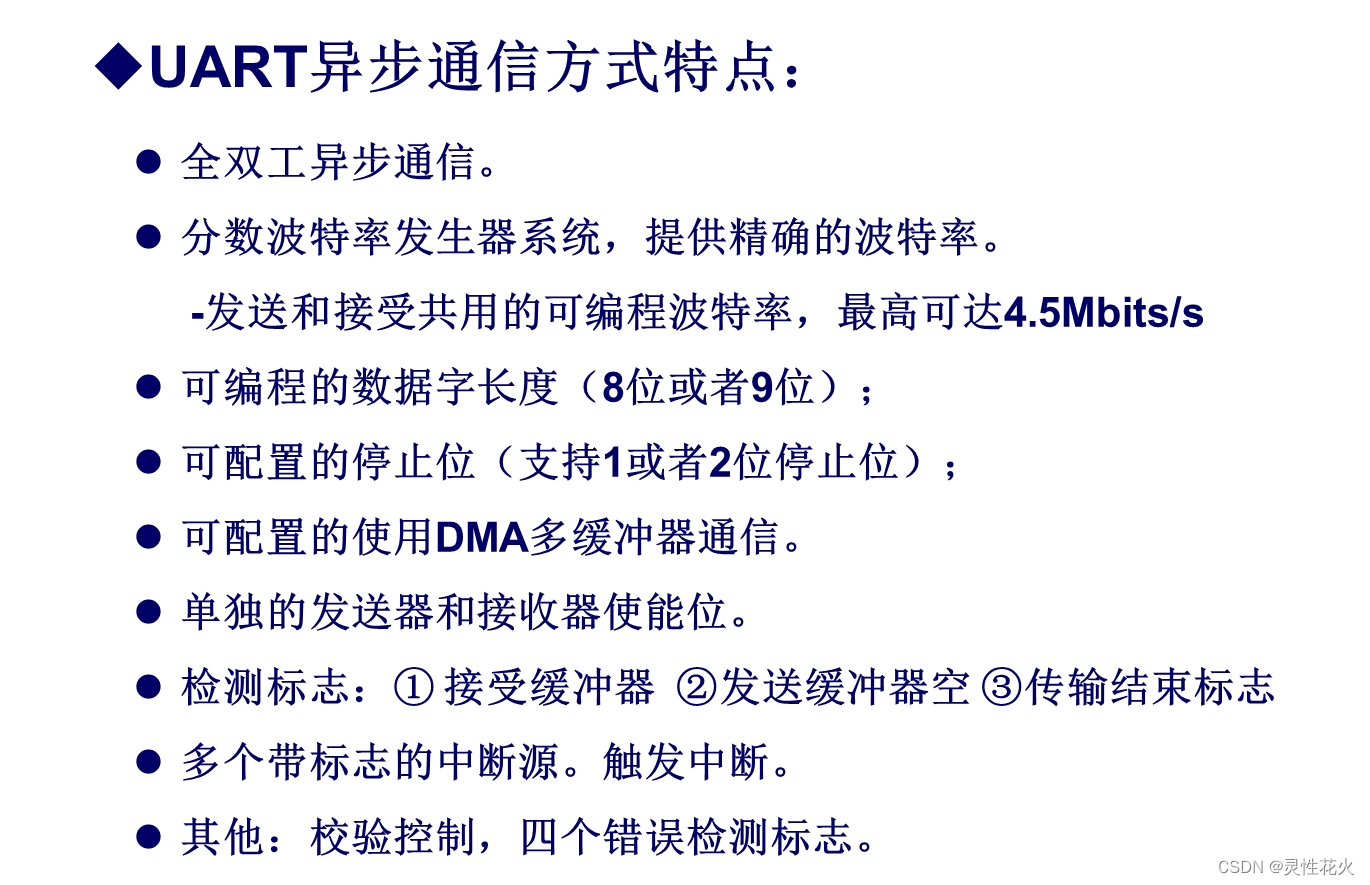
大容量STM32F10x系列芯片,包含3个USART和2个UART UART异步通信 相关内容。
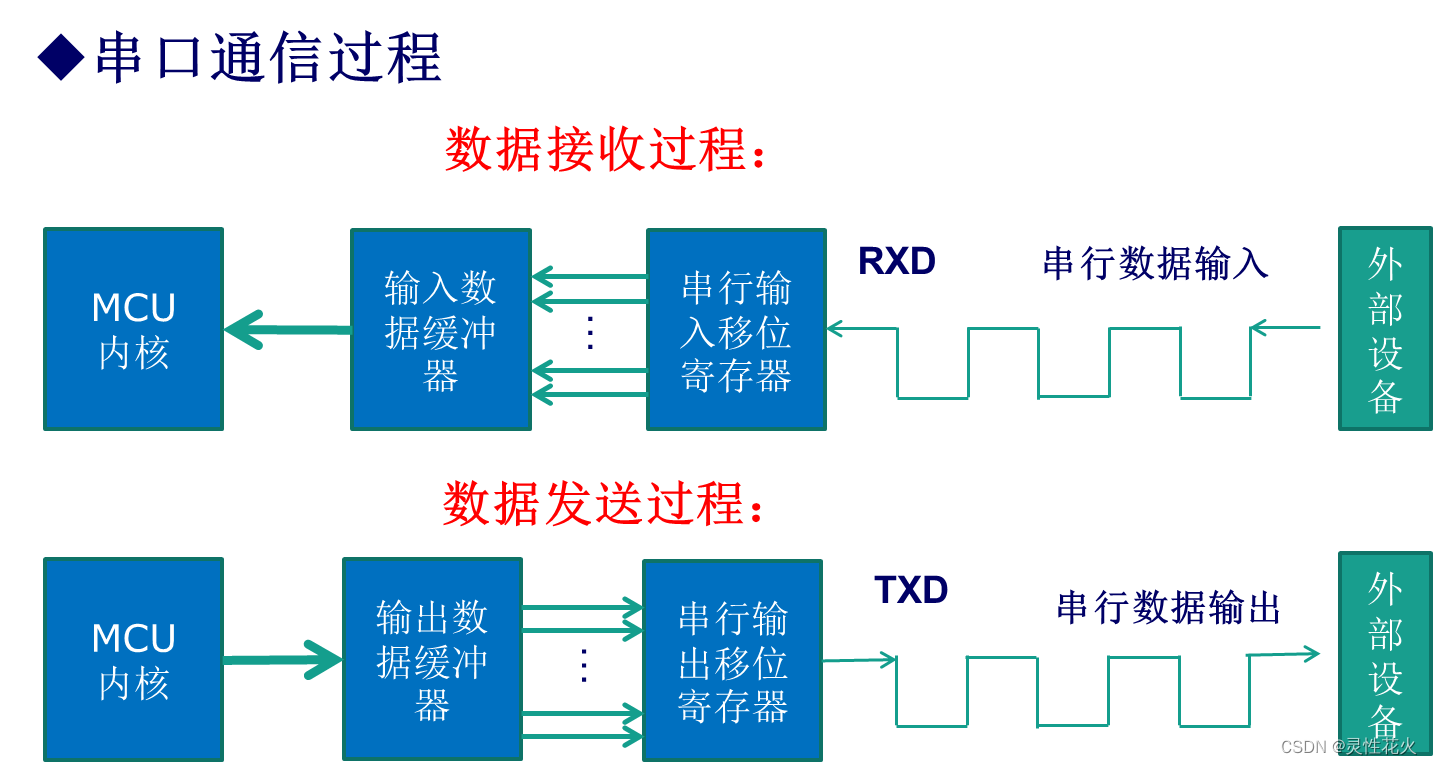
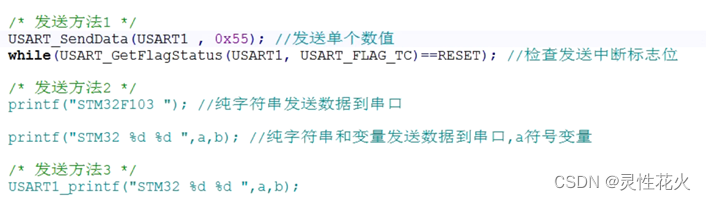
要注意:这里仅仅学习USART串口通讯方式 常用的串口相关寄存器 USART_SR状态寄存器USART_DR数据寄存器USART_BRR波特率寄存器相关的函数 void USART_Init(); //串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能 void USART_Cmd();//使能串口 void USART_ITConfig();//使能相关中断 void USART_SendData();//发送数据到串口,DR uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据 FlagStatus USART_GetFlagStatus();//获取状态标志位 void USART_ClearFlag();//清除状态标志位 ITStatus USART_GetITStatus();//获取中断状态标志位 void USART_ClearITPendingBit();//清除中断状态标志位##配置的一般步骤: 1.串口时钟使能,GPIO时钟使能:RCC_APB2PeriphClockCmd(); 2.串口复位:USART_DeInit(); 这一步不是必须的 3.GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF_PP 4.串口参数初始化:USART_Init(); 5.开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤) NVIC_Init(); USART_ITConfig(); 6.使能串口:USART_Cmd(); 7.编写中断处理函数:USARTx_IRQHandler(); 8.串口数据收发: void USART_SendData();//发送数据到串口,DR uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据 9.串口传输状态获取: FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG); void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);这一部分在代码中比较难懂是:main.c还有usart.c看不太懂 这里再解释一下 1。 USART_RX_STA&0x8000目的是取出第十六位,该位取出目的是因为检测到回车和换行就会将该位 置一(USART1_IRQHandler中断服务函数)。 所以检测该位就能调用打断函数发送数据。 2.len=USART_RX_STA&0x3fff;该USART_RX_STA后几位0-14位表示数据的长度 3.串口接受中断函数USART1_IRQHandler()这个应该是系统定义了一个头,然后原子哥在重新定义了一下函数内部,主要还是里面USART_ReceiveData() 数据的接受函数,数据全都临时存在USART_RX_BUF。具体逻辑可以看:https://blog.csdn.net/yirexiao/article/details/5135976 4.有意思的是printf("\r\n您发送的信息是\r\n");这个似乎能够直接通过USART1及进行传输2023.3.28补充: 串口通讯的流程在梳理一下: 1mcu向单片机发送数据问题 定义过串口之后(见上面叙述),在主函数需要判断有数据在单片机的缓冲区且需要处理了( USART_RX_STA&0x8000表示遇到换行和回车了,这个时候就需要mcu接收了),为了体现MCU收到数据了,我们将数据在回发送给串口即可。之后就有两个函数能够实现,一个是printf函数(缺点是和几个端口都有联系,一旦定义了第二个串口,这printf函数个就不能用了),另一个是USARTX->DR(上面说的串口数据收发void USART_SendData();//发送数据到串口就是用了这个寄存器。缺点是一次只能发送一个)这个寄存器也只能发送一个,说如果要发多个,就需要多次调用该寄存器。当然,你也可以使用printf,这个非常好用,但是缺点在于只能有一个串口,当然,杨桃代码修改了这个printf。可以参考他的代码 |
 总的来说:STM32串口通讯就两种:UART:通用异步收发器 以及 USART:通用同步/异步收发器
总的来说:STM32串口通讯就两种:UART:通用异步收发器 以及 USART:通用同步/异步收发器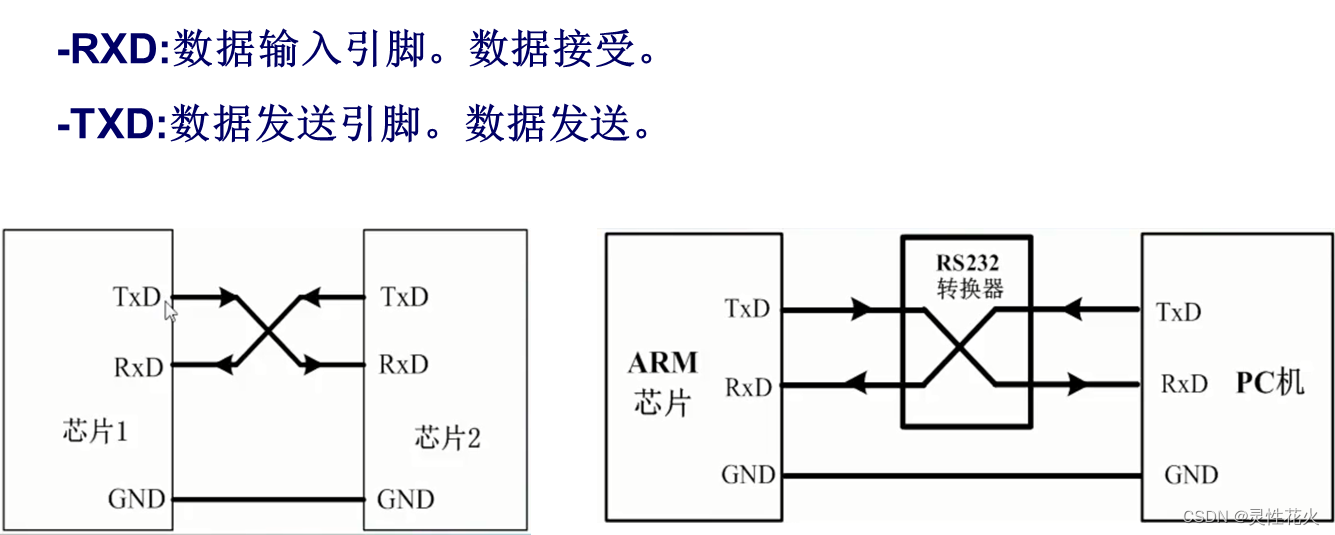
 2MCU数据接收 还存在一个问题,杨桃说有两种数据接收方式,一种是USART_GetFlagStatus(非中断的方式/查询接收),另外一种是USART_GetITStatus(中断的方式进行接收) 中断的方式就不细说了,主要是非中断 杨桃写的很简单
2MCU数据接收 还存在一个问题,杨桃说有两种数据接收方式,一种是USART_GetFlagStatus(非中断的方式/查询接收),另外一种是USART_GetITStatus(中断的方式进行接收) 中断的方式就不细说了,主要是非中断 杨桃写的很简单  当然,这两个函数需要复位某些位,先不谈了
当然,这两个函数需要复位某些位,先不谈了【本文地址】